0.0 00 Наличие и близость навигационных опасностей, а также частое изменение курсов придают судовождению в узкостях весьма сложный и напряженный характер. Плавание в узкостях требует четкого и постоянного контроля за перемещением судна с заранее спланированными обсервациями, которые должны выполняться наиболее быстрыми способами, обеспечивающими максимальную точность. Любой маневр в узкости должен выполняться только на основе предварительного расчета и измерений.
Регулирование движения судов на подходах к портам и в портовых водах
3.3 03 Плавание судов на подходах к портам и в портовых входах часто осуществляется на предельно малых глубинах, при малых отношениях сечения канала к площади мидель шпангоута судна, на малых скоростях, при которых в наибольшей степени сказывается снос от ветра и течения, ухудшается управляемость судна. Как правило, подходы к портам и портовые акватории находятся во внутренних или территориальных водах, где установлены местные правила плавания, имеется…
Основные правила движения и расхождения. судов на внутренних водных путях
0.0 00 Транспортный поток судов на внутренних водных путях характеризуется значительной неоднородностью судовых транспортных средств. Он состоит из различных видов судов: толкачей, буксировщиков, плотоводов, танкеров, грузовых, пассажирских, технических, вспомогательных судов и судов на подводных крыльях, которые отличаются друг от друга не только габаритами, водоизмещением, скоростью, но и психофизиологическими качествами судоводителей.

Системы разделения движения судов
4.0 02 Общие принципы установления путей движения судов (routing) приняты Ассамблеей ИМО (Резолюции А.378(Х) от 14.11.1977 г. и А.428(Х1) от 15.11.1979) и изложены в руководствах ГУНиО № 9036 и № 9037. Эффективным средством пассивного управления судопотоками является система разделения движения (СРД) — разделение встречных потоков судов посредством установления зон и/или линий разделения и полос движения. Наиболее часто используются СРД линейного типа (рис. 5.1).
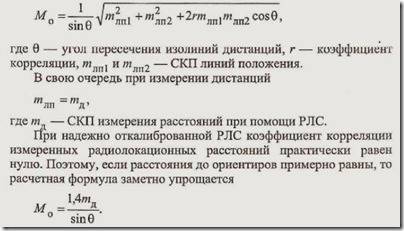
Точность обсерваций по 2-м и 3-м расстояниям, измеренным с помощью судовой радиолокационной станции
0.0 00 Радиальная СКП определения места по 2-м расстояниям, измеренным с помощью судовой радиолокационной станции (PЛC), оценивается выражением:

Точность обсерваций по 2-м и 3-м компасным пеленгам
0.0 00 Радиальная СКП определения места по компасным пеленгам двух навигационных ориентиров оценивается известным выражением: Анализ этих формул приводит к общему выводу, что точность обсервации по двум пеленгам зависит: * от точности пеленгов — чем меньше погрешности измерения и обработки пеленгов, тем точнее место; * от угла пересечения пеленгов — чем ближе этот угол к прямому, тем точнее место; * от дистанций до ориентиров —…
Точность спутниковых навигационных систем
0.0 00 На современных судах основным и наиболее распространенным способом определения места является использование американской спутниковой системы GPS Navstar (далее GPS) и российской спутниковой системы ГЛОНАСС. Судоводителями наиболее часто используется услуга стандартного определения места SPS (Standard Positioning Service), официально предоставляемая правительством США пользователям GPS бесплатно до 2010 года.

Стандарт точности судовождения Международной морской организации
0.0 00 Снижение навигационной аварийности — необходимое условие охраны человеческой жизни на море и окружающей среды от загрязнения. Противоположностью навигационной аварийности является навигационная безопасность плавания, то есть такое состояние судна в конкретных обстоятельствах, когда обеспечивается минимальный риск столкновения с неподвижными и подвижными навигационными опасностями.
Предварительная прокладка в прибрежном плавании
0.0 00 Прибрежное плавание — плавание судна в стесненных водах в пределах дальности радиолокационного обнаружения побережья (т.е. плавание в пределах 5—60 миль от побережья в зоне его постоянной или периодической видимости — либо по PЛC, либо визуально). Плавание осуществляется в зоне более плотных судопотоков, под влиянием более сильных течений, с периодическим проходом навигационных опасностей.
Предварительная прокладка
1.0 01 После подбора и корректуры карт и необходимой навигационной и справочной литературы приступают к непосредственному выполнению прокладки. Перед началом процедуры планирования следует разбить весь район плавания по генеральной навигационной карте (картам) на несколько участков в зависимости от различных обстоятельств (плотность движения, ограниченные глубины, наличие систем судовых сообщений, гидрометеорологические условия), наметить мероприятия для обеспечения безопасности плавания судна. Предварительная прокладка выполняется на путевых и частных картах наиболее…