На современных судах основным и наиболее распространенным способом определения места является использование американской спутниковой системы GPS Navstar (далее GPS) и российской спутниковой системы ГЛОНАСС. Судоводителями наиболее часто используется услуга стандартного определения места SPS (Standard Positioning Service), официально предоставляемая правительством США пользователям GPS бесплатно до 2010 года.
Радионавигационные приборы
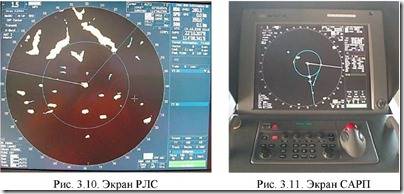
Судовая радиолокационная станция (РЛС) предназначена для обнаружения надводных объектов и берега, определения места судна, обеспечения плавания в узкостях, предупреждения столкновения судов (рис. 3.10).
Навигационные задачи и методы их решения
Навигационной задачей в СНС принято называть нахождение пространственно-временных координат потребителя и составляющих вектора его скорости, в совокупности называемых вектором потребителя. В результате решения навигационной задачи в общем случае должны быть найдены пространственные координаты потребителя (х, у, z), поправка t к шкале времени потребителя относительно шкалы времени СНС и составляющие вектора скорости как производные от координат потребителя во времени.
Навигационные характеристики спутников
К основным навигационным характеристикам НКА относятся: • зона обзора • зона видимости • продолжительность наблюдения
Движение спутника в инерциальной системе координат
Если при определении траектории движения спутника подразумевают его движение под действием только силы притяжения Земли, с одним притягивающим центром в центре масс Земли, то такое движение называют невозмущенным или кеплеровым. Если при определении траекторного движения спутника учитывают возмущающие силы, такие как притяжение Луны и Солнца, давление светового излучения, неравномерность гравитационного поля Земли и другие, то такое движение называется возмущенным.

Системы координат, применяемые в СНС
Движение НКА, как и любого небесного тела, описывается законами небесной механики и происходит под действием сил инерции и притяжения Земли. Соответственно, движение спутника рассматривается в системе координат с центром, расположенном в центре масс Земли. На рис. 2.2 схематически показаны геоцентрические системы координат, применяемые в СНС.
Обобщенная структура спутниковой навигационной системы
Спутниковые навигационные системы GPS и ГЛОНАСС создавались исходя из определенных требований, соответствующих их прямому назначению. Подразумевалась их глобальность; независимость от метеорологических условий, рельефа местности, степени подвижности объекта; непрерывность работы и круглосуточная доступность; помехозащищенность; компактность аппаратуры потребителя и др.
Спутниковые Системы Морской Навигации
Рост интенсивности мирового судоходства и создание высокоэффективных дорогостоящих судов определяют пути развития технических средств судовождения, которые должны обеспечивать соответствующее современному уровню как управление флотом, так и безопасность его плавания. Одно из главных направлений в совершенствовании технических средств судовождения связано с широким внедрением автоматических систем, основанным на использовании современной вычислительной техники. При этом перед техническими средствами определения места судна ставится задача обеспечения судоводителя непрерывной, точной, оперативной,…

Система ГЛОНАСС
Система ГЛОНАСС (Global Navigation Satellite System – глобальная навигационная спутниковая система), как и система GPS, позволяет практически в любом месте Земли (за исключением приполярных областей) определить местоположение и скорость объектов. Основой системы являются 24 спутника (в настоящий момент число спутников существенно сокращено), движущихся над поверхностью Земли на высоте 19130 км. Спутники движутся по 3 орбитальным траекториям, плоскости траекторий разнесены на 64,8 градуса. ГЛОНАСС – спутники излучают специальные сигналы в диапазоне 1598,0625…
Режим дифференциальной коррекции (DGPS – Differential GPS)
Качественно уменьшить ошибку (до нескольких сантиметров) в измерении координат позволяет режим так называемой дифференциальной коррекции (DGPS – Differential GPS). Дифференциальный режим состоит в использовании двух приемников – один неподвижно находится в точке с известными координатами и называется “базовым”, а второй, как и раньше, является мобильным. Данные, полученные базовым приемником, используются для коррекции информации, собранной передвижным аппаратом. Коррекция может осуществляться как в режиме реального времени, так и при “оффлайновой” обработке данных, например,…