Вычисления напрямую зависят от точности хода часов. Код должен генерироваться на спутнике и приёмнике в одно и то же время. На спутниках установлены атомные часы имеющие точность около одной наносекунды. Однако это слишком дорого, чтобы устанавливать такие часы в каждый GPS приёмник, поэтому измерения от четвёртого спутника используются для устранения ошибок хода часов приёмника.
Вычисления напрямую зависят от точности хода часов. Код должен генерироваться на спутнике и приёмнике в одно и то же время. На спутниках установлены атомные часы имеющие точность около одной наносекунды. Однако это слишком дорого, чтобы устанавливать такие часы в каждый GPS приёмник, поэтому измерения от четвёртого спутника используются для устранения ошибок хода часов приёмника.Эти измерения можно использовать для устранения ошибок, которые возникают если часы на спутнике и в приёмнике не синхронизированы. Для наглядности, иллюстрации приведённые ниже рассматривают ситуацию на плоскости, так как только три спутника необходимо для вычисления местоположения объекта.

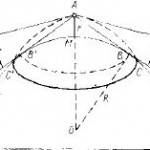
Если часы на спутнике и в приёмнике имеют одинаковую точность хода, то точное местоположение может быть найдено по измерениям расстояния до двух спутников. Если получены измерения с трёх спутников и все часы точные, то круг описанный радиус-вектором от третьего спутника будет пересекаться как показано на рисунке выше. Однако, если часы в приёмнике спешат на 1 секунду, то картина будет выглядеть следующим образом.
Если сделать замер до третьего спутника, то полученный радиус-вектор не пересечётся с двумя другими как показано на рисунке.
Когда GPS приёмник получает серию измерений которые не пересекаются в одной точке, то компьютер в приёмнике начинает вычитать (или добавлять) время методом последовательных итерации до тех пор, пока не сведёт все измерения к одной точке. После этого вычисляется поправка и делается соответствующее уравнивание.
Если вам требуется третье измерение, то необходим четвёртый спутник для устранения ошибок хода часов в приёмнике.

Таким образом, при работе в поле вам необходимо иметь минимум четыре спутника, чтобы определить трёхмерные координаты объекта.
Однако в жизни все не так просто. Приведенные выше рассуждения были сделаны для случая, когда расстояния от точки наблюдения до спутников известны с абсолютной точностью. Разумеется, как бы ни изощрялись инженеры, некоторая погрешность всегда имеет место (хотя бы по указанной в предыдущем разделе неточной синхронизации часов приемника и спутника, зависимости скорости света от состояния атмосферы и т.п.).
Поэтому для определения трехмерных координат приемника привлекаются не три, а минимум четыре спутника. Получив сигнал от четырех (или больше) спутников, приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.