Важнейшими характеристиками маневров торможения судна являются время t, путь торможения S(t) и скорость V(t).
Для практики важен наиболее эффективный способ остановки движения — торможение судна с помощью гребного винта. Длина тормозного пути при этом зависит от нескольких основных факторов: водоизмещения судна, начальной скорости, типа энергетической установки и ее мощности, характеристик гребного винта.
Изменение направления вращения гребного винта (реверсирование) совершается для изменения движения судна (вперед, назад), а также для ускорения его остановки. Можно отметить два принципиально различных метода реверсирования гребного винта: применение специального реверсивного механизма; использование механического гидравлического или электрического промежуточного привода между коленчатым и гребными валами. В настоящее время реверсивными механизмами снабжают только мощные тихоходные судовые дизели. На быстроходных дизелях установлены реверсивные муфты с механическими или электрическими приводами.

Реверсивные устройства объединяют с топливоподающими и пусковыми, а также блокируют с машинным телеграфом.
Процесс торможения судна, идущего передним ходом, условно можно разделить на три периода (рис. 14.10).
Первый период (время t1)—от момента установки на машинном телеграфе команды заднего хода до момента прекращения подачи топлива в двигатель (или закрытия стопорного клапана в случае, если судно имеет паровую машину или турбину). В этот период судно следует с постоянной скоростью установившегося движения Vc. Путь судна, пройденный в этот период,

Продолжительность периода t1 зависит от типа энергетической установки, наличия или отсутствия дистанционного управления главными двигателями и действий механика. Время t1 определяется только по эксперименту на конкретном судне. Для расчетов можно принять t1 = 5÷7 с.
Второй период (время t2) — с момента прекращения подачи топлива до пуска двигателя на задний ход. В целом продолжительность второго периода весьма существенно зависит от действий механика и обычно оценивается статистическим путем.
Применение специальных средств при выполнении команды значительно ускоряет процесс и делает его эффективным. Таким средством в дизелях с воздушной реверсивно-пусковой системой является подача воздуха для пуска на задний ход еще до остановки двигателя (контрвоздух). Как правило, для подачи контрвоздуха частоту вращения дизеля надо снизить, она должна составлять не более 50% номинальной. В начале вращение дизеля происходит на воздухе, по достижении надежной пусковой частоты вращения осуществляется перевод на топливо. В первом приближении можно считать, что при частоте вращения, составляющей 20—30% номинальной, двигатель можно успешно останавливать с помощью контрвоздуха. Время падения частоты вращения до значения, равного 20—30% номинального, при торможении судна с полного переднего хода (в грузу) составляет ориентировочно 1—4 мин.
Движение судна во втором периоде можно рассматривать как режим пассивного торможения, который описывается следующим дифференциальным уравнением:

где е, eL — коэффициенты, учитывающие влияние соответственно глубины моря и свободно вращающегося гребного винта.
После разделения переменных и интегрирования в пределах от О до ti и от Ус до Vt получим (в с):

откуда
![]()
где Vc — начальная скорость, м/с;
t1 — время пассивного торможения, с.
Данная формула позволяет получить значение скорости на любом участке пассивного торможения, если известны величины т и К. Подставив в формулу (14.12) значение t1, равное t2, расчетным путем получим: Vi= V2.
Испытания показали, что у теплоходов гребной винт может развивать максимальную тормозную силу при V2≈ (0,5÷0,7) Vc, а у турбинных V2 = 0,37 V С.
Для нахождения пути пассивного торможения используем выражение для его элементарного участка: dS=Vidt. Подставив в выражение (14.12) вместо Vi равное ему отношение dS/dt, после интегрирования и преобразований получим путь торможения (в м):

Аналогично при Vi=V2 можно рассчитать Si = S2.
Из формул (14.11), (14.13) следует, что при пассивном торможении теоретически полная остановка судна (F, = 0) произойдет только при ti =, при этом S—>. В действительности при испытаниях суда останавливаются при полной потере скорости. Такое расхождение объясняется тем, что принятый в уравнении (14.10) пока~-затель степени п —2 на малых скоростях судна не соответствует действительности. При таких скоростях более справедливо принимать п<2.
Однако время и путь можно определить, приняв, что в конце торможения скорость имеет некоторое малое значение, при котором практически можно считать судно уже остановившимся, например Vi =0,1Vc.
Третий период — это активный участок торможения судна при частоте вращения движителя на задний ход в заданном режиме.
Процесс активного торможения описывается дифференциальным уравнением

Данное уравнение справедливо при определенных допущениях. Исследованиями доказано, что упор винта на заднем ходу колеблется в незначительных пределах и равен некоторому среднему значению Т, эквивалентному по конечному результату торможения переменному упору T(t). В этом случае уравнение (14.14) интегрируется в конечном виде. Принимая в качестве начальных условий характеристики второго периода ti= t2, S,- = S2 и Vi = V2, получим следующие выражения для характеристик третьего периода:

В приведенных формулах: ii — время активного торможения, с; Vi — скорость, м/с; Si — путь активного торможения, м.
Третий период торможения заканчивается при Vi, = 0. Тогда:

Окончательные полные выражения времени и пути торможения судна получаем суммированием отдельных их значений по трем периодам:

Тормозные характеристики судов с турбинной установкой имеют некоторые отличия от соответствующих характеристик судов с ДВС при прочих равных условиях. Известно, что турбина является нереверсивной машиной. Для обеспечения реверса и той или иной мощности заднего хода судовые турбозубчатые агрегаты (ГТЗА) нуждаются в постановке турбины заднего хода (ТЗХ). В практике проектирования, постройки и эксплуатации большого числа ГТЗА для ТЗХ транспортных судов получила распространение следующая спецификация: турбина должна обеспечивать вращающий момент, равный 80%, при частоте вращения на задний ход, равной 50% частоты вращения, развиваемой при номинальной мощности переднего хода и при том же расходе пара. Таким образом, расчетная мощность ТЗХ составляет примерно 40% номинальной мощности агрегата. Поэтому путь и время торможения турбоходов больше, чем эти величины для теплоходов таких же размеров.
Торможение судов, оборудованных винтами регулируемого шага (ВРШ), осуществляется путем поворота лопастей винта без изменения направления его вращения. В зависимости от скорости поворота ВРШ разделяют на группы: к первой относят винты, у которых полный поворот лопастей из положения переднего хода на положе-жение полного заднего хода осуществляется за время менее 30 с; ко второй — ВРШ со временем перекладки 30 с и более. Суда с ВРЩ второй группы обладают пониженными тормозными качествами. Судно с ВРШ выполняет маневр торможения в несколько раз быстрее (примерно на 15—20%), чем аналогичное судно с винтом фиксированного шага.
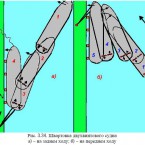
Рассмотренный метод расчета инерционных характеристик судна построен на допущении, что в процессе торможения на судно действуют только продольные силы и вплоть до остановки оно со* храняет исходное направление своего движения. Во всех случаях рассматривается только первое уравнение системы (14.2).
Однако испытания показывают, что даже при хороших .погодных условиях, отсутствии течения и прямо поставленном руле судно перемещается по криволинейной траектории. К моменту полной остановки оно может развернуться даже на обратный курс. Это объясняется появлением поперечной силы на корпусе судна в районе кормовых обводов, когда на него воздействует обратная струя от гребного винта. При реверсе винта правого вращения судно в-большинстве случаев разворачивается вправо.
При выполнении экстренной остановки иногда применяют перекладку руля с борта на борт, что может значительно сократить путь в первом и втором периодах торможения. В режиме активного торможения судно оказывается фактически неуправляемым.