Для решения задачи движения судна в горизонтальной плоскости необходимо знать силы и моменты, действующие на корпус судна и его средства управления. Они разделяются на три группы: движущие, внешние и реактивные.
Движущие силы: упор гребного винта, боковая сила руля, силы, создаваемые средствами активного управления и т. п.
Внешние силы: силы давления ветра, волнения моря, течения. Эти силы, как правило, создают помехи при маневрировании.
Реактивные силы: силы и моменты, возникающие в результате движения судна под действием движущих и внешних сил. Реактивные силы зависят от линейных и угловых скоростей и разделяются по своей природе на инерционные и неинерционные.
Инерционные силы и моменты, Rи, обусловлены инертностью судна и присоединенных масс жидкости. Они возникают только при наличии ускорений – линейного, углового, центростремительного. Инерционная сила всегда направлена в сторону, противоположную ускорению. При равномерном прямолинейном движении судна инерционные силы не возникают.
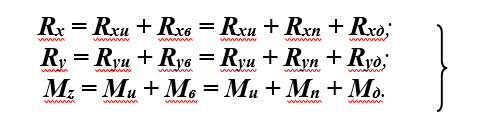
Неинерционные силы и моменты, Rв, обусловлены вязкостью забортной воды, т. е. являются гидродинамическими силами и моментами. Гидродинамические силы и моменты принято подразделять по характеру движения судна, при котором они возникают, на позиционные и демпфирующие.
Позиционные силы и моменты, Rn, действуют на судно при прямолинейном движении судна с углом дрейфа.
Демпфирующие силы и моменты, Rд, – добавочные силы и моменты, обусловленные вращением судна вокруг вертикальной оси.
Общие выражения для сил и моментов, действующих на корпус судна при его криволинейном движении записываются в виде:
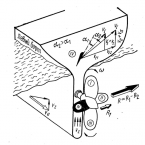
При рассмотрении задач управляемости используется подвижная система координат, связанная с судном с началом в центре тяжести ЦТ. Положительные направления осей: X – в нос; Y – в правый борт; Z – вниз.
Положительный отсчет углов принимается по часовой стрелке, однако, за исключением в отношении угла перекладки руля δ, угла дрейфа β и курсового угла ветра (течения) КУ.
За положительное направление перекладки руля δ принимают перекладку, вызывающую циркуляцию по часовой стрелке, т. е. перекладку на правый борт (перо руля при этом перемещается против часовой стрелки).
За положительный угол дрейфа принимается угол β, при котором поток воды набегает со стороны левого борта и создает при этом положительную поперечную гидродинамическую силу на корпусе. Такой угол дрейфа возникает при правой циркуляции судна.
Общий случай движения судна описывается системой из трех дифференциальных уравнений: двух уравнений сил по продольной Х и поперечной Y осям и уравнения моментов вокруг вертикальной оси Z.
выражения в упрощенном виде и в параметрах скорости V, угла дрейфа β и угловой скорости ωz записываются в виде:
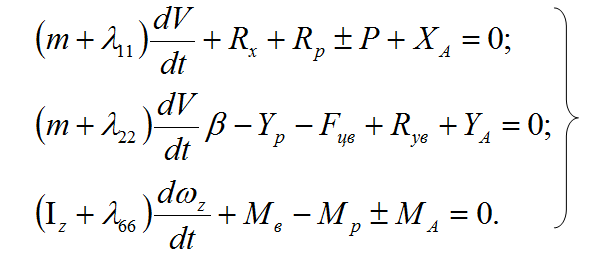
В этих системах:
m – масса судна;
Rx – продольная гидродинамическая сила на корпусе (сопротивление воды);
Ry – поперечная гидродинамическая сила на корпусе;
Mz – общий момент сил, приложенных к корпусу при криволинейном движении;
V – скорость судна;
β – угол дрейфа;
ωz – угловая скорость судна относительно оси Z;
Іz – момент инерции судна относительно оси Z;
Rp – продольная составляющая силы действия воды на руль;
P – упор гребного винта;
XA – продольная составляющая силы ветра;
YA – поперечная составляющая силы ветра;
MA – момент силы ветра YA относительно оси Z;
Fцв – центробежная сила инерции;
Yp – боковая сила руля, отклоненного от диаметральной плоскости ДП;
Mp – момент боковой силы руля относительно оси Z;
Ryв – поперечная гидродинамическая сила, приложенная к корпусу при его движении с углом дрейфа;
Mв – момент поперечной гидродинамической силы Ryв относительно оси Z;
λ11 – присоединенная масса воды при движении судна по оси X (λ11 = md/2L);
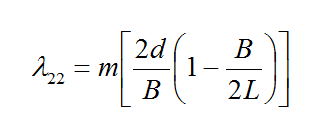
λ22 – присоединенная масса воды при движении судна по оси Y:;
λ26 – статический момент присоединенных масс воды;
λ66 – момент инерции присоединенных масс воды:;
L – длина судна;
B – ширина судна;
d – осадка судна.
Приведенные формулы для определения присоединенных масс по трем осям дают приближенные значения – более точно можно посчитать через коэффициенты присоединенных масс k11, k22, k66, которые можно выбрать из графиков, приведенных в справочниках по теории корабля.
Определение сил и моментов осуществляется тремя способами: теоретическим, экспериментальным и расчетно-экспериментальным. Для практических расчетов силы и моменты, действующие на корпус, винт и руль, определяют по отдельности, вводя в результаты коэффициенты взаимодействия.