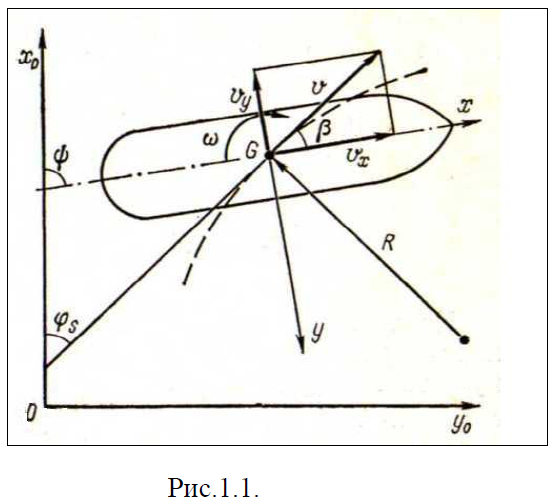
В теории управляемости приходится иметь дело с изучением движения судна на криволинейной траектории. При этом без существенных погрешностей, можно рассматривать движение судна в плоскости ватерлинии или параллельной ей плоскости. Таким образом, задачу определения элементов криволинейного движения судна можно рассматривать как плоскую задачу динамики. Для описания такого движения вводят две системы координат — неподвижную Х0О0 У0 , и подвижную ХGУ, жестко связанную с судном. Направление осей…