При работе ДЭУ с ВРШ имеется возможность дополнительного изменения нагрузки путем воздействия на шаг винта. При этом наряду с положительными качествами, которые отмечались ранее, представляется возможность компенсировать влияние внешних факторов на характеристику винта и исключить режимы работы в области “тяжелого“ винта. В то же время при работе на ВРШ условия для перегрузки дизеля значительно, более вероятны, чем при работе на ВФШ. Эти обстоятельства выдвигают ряд специфических требований к системам управления, защиты и к назначению режимов.
Наиболее полно этим требованиям удовлетворяет система дистанционного автоматизированного управления (рис).
Схема дистанционного управления ДЭУ с ВРШ (дизель Пилстик 6РС2-3).
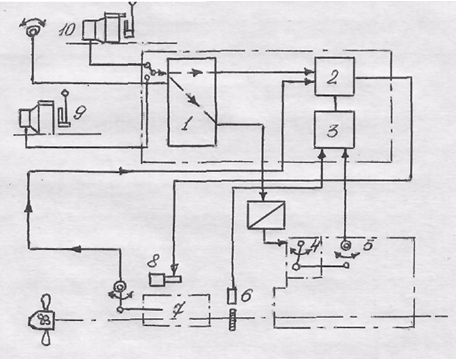
Представленная схема включает устройство комбинированного программного изменения шага и частоты вращения (поз.1) и регулятор нагрузки (поз.3). В многомашинных ДЭУ предусматривается также и автоматическое распределение нагрузки между дизелями. Комбинатор воздействует на всережимный регулятор (поз.4) и элементы механизма изменения шага (поз.2,7,8). Регулятор нагрузки работает во взаимодействии с регулятором шага 2 и датчиками входных сигналов по положению рейки топливных насосов (поз.5) и частоты вращения винта (поз.6). Командные сигналы на задание частоты вращения n и шага винта вводятся рукоятками телеграфов на ходовом мостике или из ЦПУ.
Особенности работы дизеля на ВРШ прослеживаются на всех стадиях задания режимов. Пуск и прогревание дизеля производится только из ЦПУ или с местного пульта управления. Дизель работает в режиме холостого хода при конструктивном нулевом упоре винта. Только после прогревания и проверки рабочих параметров управление передается на мостик и сообщается о готовности дизеля.
Последующие изменения режимов работы дизеля и хода судна осуществляются переключением рукоятки телеграфа на мостике. Командный сигнал поступает в комбинатор и разделяется на сигнал заданного шага Н/D и частоты вращения n в соответствии с комбинаторной диаграммой [9]. Она охватывает все возможные режимы работы ДЭУ при маневрировании и эксплуатационных ходах судна. С её помощью можно определить характерные сочетания Н/D и n, при которых обеспечиваются максимальный упор винта на швартовах и режимы длительной эксплуатационной и максимальной мощности.
К другим особенностям работы дизеля относится действие регулятора нагрузки. В процессе маневрирования из-за инерции судна и на установившихся режимах вследствие влияния внешних факторов на сопротивление движению судна возможны перегрузки дизеля или, наоборот, недоиспользование мощности. Благодаря регулятору нагрузки такие условия автоматически устраняются корректированием шага винта. При всех внешних возмущениях путем изменения шага винта можно стабилизировать нагрузку Ре(Ме) и мощность дизеля. Область нагрузок и частот вращения охватывается программами [9]. Задание программ регулятора нагрузки возможно только из ЦПУ и производится в соответствии с техническим состоянием дизеля или спецификой работы судна. Выбор оптимальных программ особенно важен для траулеров, буксиров, судов ледового плавания, так как позволяет существенно улучшить тяговые свойства и без перегрузки дизеля получить необходимую скорость хода во льдах, с тралом, с буксиром. С использованием регулятора нагрузки решаются и другие важные задачи по оптимизации управления дизелем в частности:
– оптимизируется подача топлива во всем диапазоне скоростных режимов независимо от обрастания, глубины под килем, мертвой зыби, встречного ветра;
– улучшаются маневренные качества судна и сокращается тормозной путь при экстренной остановке;
– осуществляется автоматическая защита дизеля от перегрузки при выходе из строя ТНВД, форсунок отдельных цилиндров, а при внезапном разобщении муфт или остановке
дизеля в многомашинных ДЭУ режимы работы отдельных дизелей определяются соответствующей программой [9];
– обеспечивается лучшее использование ресурса дизеля путем
переключения программ и приведения их в соответствие с
состоянием дизеля, сортом применяемого топлива;
– стабилизируется частота вращения на режимах работы с
валогенератором при переменных внешних условиях, а при
колебаниях тока в цепи валогенератора поддерживается
полная загрузка главных дизелей.
Необходимо отметить, что регулятор нагрузки осуществляет только автоматическую коррекцию шага по Фактической частоте вращения, а не автоматический выход на режим полного хода по временной программе. Тем не менее, он предохраняет дизели от небрежного обращения с рукоятками управления на мостике или в ЦПУ. Его динамические характеристики удовлетворяют требованиям переходных режимов при маневрировании, в том числе и в таких тяжелых условиях, как быстрое изменение шага винта с полного хода “ВПЕРЕД“ на полный ход “НАЗАД“.
Во избежание частых изменений положения лопастей винта регулятор настраивается на воздействие сравнительно плавных внешних возмущений (длительность возмущения свыше 5 с, зона нечувствительности +–I}52%) и в штормовых условиях, как правило не используется.
Важные преимущества, получаемые от применения программных регуляторов нагрузки, привели к тому, что комбинированное воздействие на шаг винта и частоту вращения дизелей в сочетании с автоматической коррекцией шага является основным способом управления в ДЭУ ВРШ табл.1.1. [9] ( основной режим работы мостик, ЦПУ).
Способ управления ДЭУ
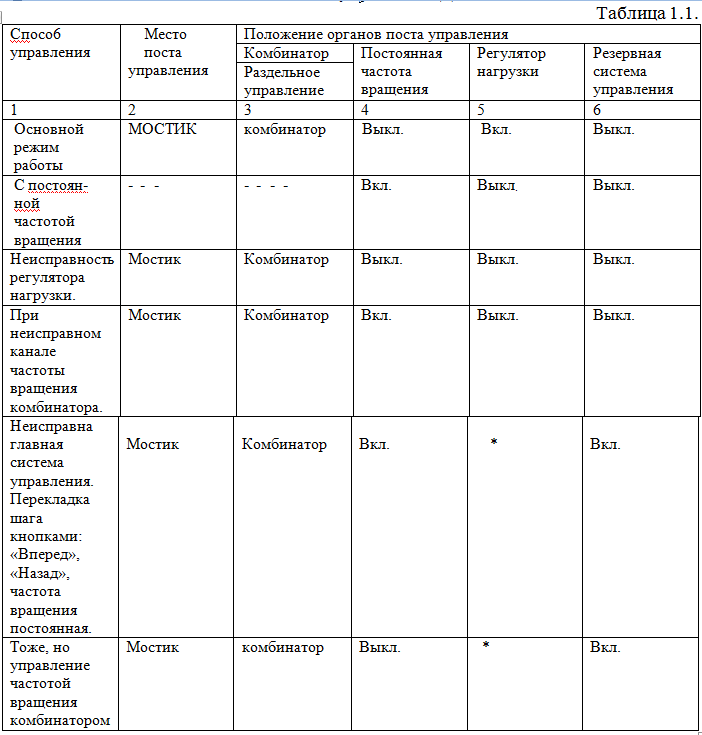

Другие возможные способы управления рассматриваются как частные или аварийные. Например, при необходимости использовать валогенераторы на режимах маневрирования осуществляется способ управления (с постоянной частотой вращения, табл.1.1.), обеспечивающий работу главных дизелей по нагрузочной характеристике с постоянной номинальной частотой вращения.
В случае выхода из строя системы ДАУ предусматривается аварийное управление из ЦПУ с местных постов (управление шагом и частотой вручную с помощью редукционных клапанов и то же, но без регулятора нагрузки, табл.1.1.).
К другим особенностям работы дизелей на ВРШ относят наличие режимов холостого хода и работу с малой нагрузкой при повышенной частоте вращения.
Из опыта эксплуатации следует, что на выбор способов управления (Н/D =var, n =var) или (H/D=var, n=const) оказывает влияние также степень загрязнения газовпускных трактов на режимах маневрирования. Критерием здесь является температура выпускных газов. При температуре tr<300°С характерный для комбинаторных режимов отмечается значительное отложение в трактах жидких масляных остатков.
Чаще всего на ВРШ работают среднеоборотные дизели с редукторной передачей, система непосредственного реверсирования которых может сохраняться, как резервное средство на случай заклинивания лопастей гребного винта.
Однако высокие маневренные качества и возможность стабилизации режимов позволяет с успехом использовать ВРШ и в ДЭУ с прямой передачей и с МОД. По данным [9] например, в сравнении с однотипными судами “Новгород” применение ВРШ на т/х “Новомиргород” с дизелем 6RD 76 при экстренном торможении с полного хода “ВПЕРЕД” дает сокращение выбега судна в 1,5-2 раза и переходный режим протекает без превышения номинального крутящего момента и давления Pz (рис).
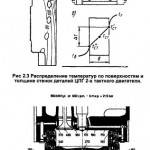
Изменение параметров дизеля при реверсировании
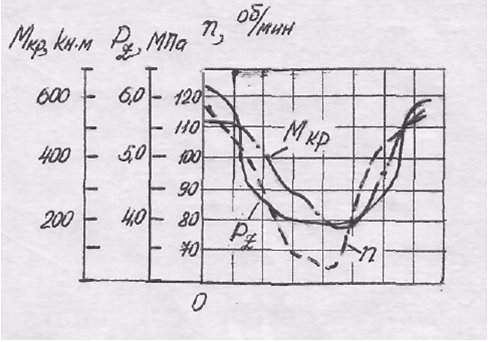
Кроме того, из-за уменьшения числа пусков в среднем в 10 раз изменение параметров на режимах маневрирования характеризуется меньшими скоростями нарастания давления ΔР/Δφ и меньшими колебаниями температур стенок камеры сгорания.