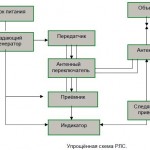
Принцип работы современных эхолотов основан на измерении времени прохождения в воде импульса ультразвуковых колебаний от судна до дна моря и обратно.
Принципиально эхолоты могут отличаться лишь способом определения и регистрации промежутков или функций этого времени. В эхолотах отечественного производства применяется; а) метод среднего значения анодного тока тиратрона или электронной лампы, пропорционального глубине, и б) метод линейной развёртки времени.
Первый метод применяется в эхолотах для измерения малых глубин (“Река”, РЭЛ-6). Второй метод применяется во всех морских навигационных эхолотах типа НЭЛ, в связи с тем, что он является наиболее надёжным, простым и обеспечивающим автоматическую запись глубин достаточно простыми конструктивными средствами.
Гидроакустические антенны эхолотов подразделяются на пьезоэлектрические и магнитострикционные.
Пьезоэлектрические антенны имеют К.П.Д. до 0,6 – 0,7 и позволяют преобразовывать колебания частотой до сотен килогерц. Магнитострикционные антенны имеют К.П.Д. порядка 0,3 – 0,5 и удовлетворительно работают на частотах до 30 – 40 КГц.
В эхолотах последних разработок используется импульсный способ возбуждения, обеспечивающий большую точность измерения малых глубин.
В целях безопасности мореплавания последние навигационные эхолоты включают устройство сигнализирующие о выходе судна на заданную глубину. (НЭЛ-5, НЭЛ-10).
Эхолот НЭЛ-М2 устанавливают на крупнотоннажных судах; эхолот НЭЛ-М3Б на судах всех классов, включая быстроходные катера, взрывоопасные суда и ледоколы.
Эхолот НЭЛ-М2 в отличие от эхолота НЭЛ-М3Б и всех предшествующих навигационных эхолотов является двухчастотным, т.е. имеет две рабочие частоты – 12 КГц и 169 КГц. Частота 169 КГц используется для измерения глубин до 400 м, частота 12 КГц – от 400 до 3000 м.
Переход с одной частоты на другую происходит автоматически с переключением диапазонов измерения.
Надежность получаемой информации о глубинах от эхолотов
Погрешности эхолотов обусловленные внешними условиями.
Они возникают при отклонении действительной скорости распространения звука от расчётной. Скорость распространения звука в морской воде зависит от температуры, солёности и гидростатического давления. При повышении температуры на 1O скорость уменьшается на 4 м/с, при увеличении солёности на 1 % возрастает на 1 м/с, при увеличении глубины на 10 м повышается на 0,2 м/с. При расчётной скорости 1500 м/с ошибка DН не превышает 3,5 % измеряемой глубины для любой точки Мирового океана.
Влияние качки. При качке судна ось антенны отклоняется от вертикали. В результате эхолот показывает глубину несколько больше действительной. Кроме того, когда угол крена превышает половину угла диаграммы направленности антенны, показания эхолота могут пропадать. При плавании на волнении, особенно в балласте, судно носовой частью захватывает атмосферный воздух. Пузырьки воздуха, попавшие под корпус судна, вызывают сильное рассеяние, отражение и поглощение звуковой энергии, создавая помехи и даже длительные перерывы в индикации глубины.
Влияние структуры грунта. Наиболее чёткая индикация получается при твёрдом грунте (каменная плита, плотный песок и т.п.). Однако в отдельных случаях при малых глубинах индикация от каменной плиты может пропадать ввиду зеркального отражения эхоимпульса и непопадания его на вибратор-приёмник. При илистом грунте индикация от верхней границы ила может не быть, а появится индикация от подстилающего твёрдого грунта. Может появиться и двойная индикация: от верхней границы ила и от подстилающего грунта. Двойная индикация хорошо просматривается на самописце.